

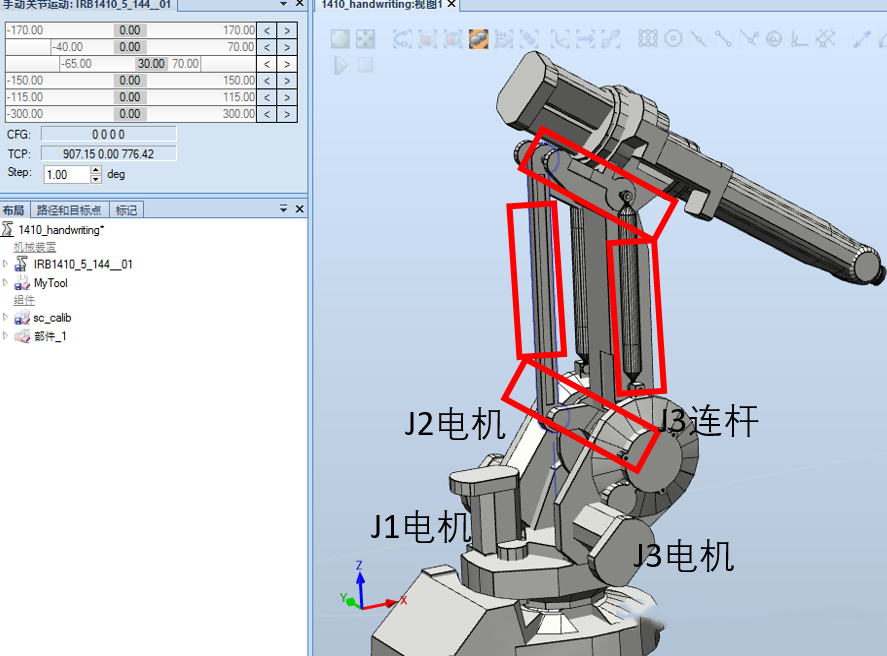
1 . IRB1410机器人是典型的ABB连杆机器人,J3电机如图所示。J3电机放置在底部,以减轻上部机构的重量
2. 移动时,J3电机驱动J3连杆。3轴、J3连杆、上臂、后端连杆构成如图所示的平行四边形结构。
3.因此,如果两轴电动机旋转,但硬件电动机不转动,然后使用硬件和大臂之间的角度会改变(对于机器人没有连杆,两轴电动机旋转,但硬件电动机不转动,所以使用硬件和大臂之间的角度不会改变)。
在上面两幅图中,三个轴都是0度,但是由于两个轴的旋转,三个轴与大臂之间的角度不同
4. 对于不需要连杆的机器人正运动学,可以将dh参数转换为各轴的位姿矩阵,将六个位姿矩阵右乘即可得到机器人当前末端的笛卡尔坐标。具体来说,请看看机器人是如何从每个轴的角度计算电流XYZ的
5. 但是对于有连杆的机器人,2轴的变化会导致3轴与大臂的角度变化。因为是平行四边形结构,第三轴和大臂夹角的变化量等于第二轴夹角的变化量的负值。
6. 因此,右乘对齐矩阵时,只需要将其乘以3轴矩阵,然后再乘以一个旋转矩阵来补偿夹角。
更多详情了解ABB机器人